Ing. Josef Šroll, Ph.D.
Zařízení slouží ke generování velmi přesných kmitočtů pro kalibraci čítačů, kmitočtových stupnic apod.
Technické údaje
Výstupní kmitočty: 10 MHz, 1 MHz.
Tvar výstupního signálu: sinusový
Zdroj signálu: družice GPS
Úvod
|
V časopise
Praktická elektronika
č.2/2021 vyšel článek [1]
Frekvenční
normál
řízený signálem GPS. Autor se
viditelně inspiroval
článkem od OK2IMH [2]
a dále [3].
Na první pohled mne zaujaly některé podivnosti.
Základem je modul NEO-7 s logikou 3,3 V, ale
řízen
je z
procesoru Atmega328 s logikou 5 V přímo. Ve
schematu (obr.2
časopisu)
je modul NEO-7 napájen z 5 V, přestože
má být
pouze 3,3 V - chyba vzniklá
překreslováním
obrázku, neboť na plošném spoji to je
dobře. NEO-7
stojí přes
700,-Kč, takže dost zarážející
neopatrnost. Z něj
přímo vychází kmitočet 1 MHz,
což
zařízení výrazně
zjednodušuje.
Místní oscilátor 20 MHz po
vydělení na
1 MHz
se fázovým závěsem [4]
řídí
právě kmitočtem z NEO-7. Ovšem jako
fázovací
článek je obyčejný RC. Což mne překvapilo z
hlediska
stability. Takže jsem se rozhodl to vyzkoušet. Podle toho,
že
jako fázový detektor je použito hradlo XOR
místo
kruhového detektoru s jeho transformátory se
zřejmě
předpokládá nenáročné
použití.
Určitý
náznak problému v článku je - čekat
hodinu na
ustálení kmitočtu, nejspíš
tedy
právě smyčky PLL. Ovšem během návrhu
jsem se
stále více odkláněl od
původního vzoru.
Samozřejmě jsem zavrhl výstup nižších
kmitočtů, u
svého
normálu
DCF
sice mám výstupy od 10 MHz až do
1 kHz, ale ve skutečnosti
používám jen
nejvyšší dva a
ostatní tam jsou vlastně jen pro parádu.
|
Kmitočty
nižší až po 1 Hz možná někdo
potřebuje s touto
přesností, i když nevím k čemu.
Dále
výstup
obdélníkových pulzů se skokově
nastavitelnou
přesnou amplitudou mi je k ničemu. Zato ale požaduji
sinusové
výstupy, abych mohl tímto
zařízením
seřizovat jiné oscilátory
prostřednictvím
Lissajousových obrazců. A skutečně - původně
navržená
smyčka PLL se synchronizaci dlouze brání.
Dříve
publikované podobné
zařízení [5]
je pravý opak - synchronizace proběhne během zlomku vteřiny,
což
ale znamená, že se na výstupech objeví
i
část šumu původního kmitočtu. Takže
moje smyčka
dokonale filtruje a usazení trvá jen několik
vteřin.
Ovládání NEO-7 procesorem je
dobré, program
lze snadno upravit konkrétním požadavkům.
Vyhozeno
tlačítkové
ovládání
výstupního kmitočtu, když bylo rozhodnuto jen pro
dva
nejvyšší, tak se prostě vyvedou
přímo na
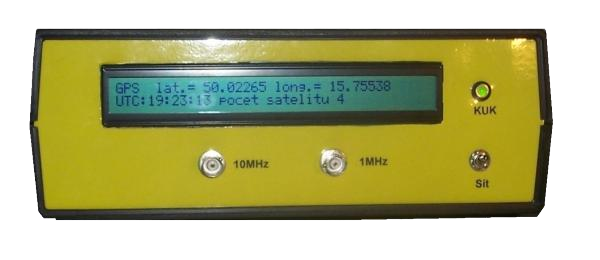
panel. Displej je spíš pro ozdobu. Ale je to dobrá
záminka pro použití procesoru, aby to vypadalo pokrokově. Proč
ale utrácet za uvedený displej,
když se v šuplíku válí
pár
nepoužitých, toužících po
spotřebování. Jsou velké, 2x40 znaků.
Aby byla
jeho plocha nějak využita, tak se tam zobrazí
zeměpisné
souřadnice GPS polohy, i když nejsou potřeba. Je tu ale jiný
problém - onen displej nemá
podsvícení,
takže údaje na něm jsou špatně vidět. Proto je
vedle
dvoubarevná LED dioda, která signalizuje, v
jakém
módu to právě pracuje:
svítí - červeně: po zapnutí se
hledají
družice, žlutá (červená + zelená) - už
jsou min. 3
družice a nabíhá smyčka PLL,
zelená -
fázový závěs sedí.
|
Použité technologie
|
GPS moduly dříve
měly výstup 1PPS (1 Pulse-per-second - česky jeden puls za
vteřinu). U dnešních
modulů je možno naprogramovat, kolik má těch pulzů za
vteřinu být. Takže signál byl
přejmenován
na PPS (česky: ? pulzů za vteřinu - jak to asi přečíst?)
|
Tady se naprogramuje milion
pulzů za
vteřinu, takže 1 MHz. Ale není to čistý
kmitočet, je nutno
jej filtrovat. Navíc když modul
nepřijímá
signál alespoň ze třech družic, tak z modulu neleze nic. To
se v
zařízení řeší
tím, že se smyčka PLL
rozepne a řídící napětí pro
interní
oscilátor PLL je určeno nastaveným trimrem.
|
Provedení
|
Na rozdíl od
původního
provedení je přístroj doplněn
síťovým
zdrojem, protože se jeho použití na kopci
nepředpokládá. Případná
úprava na
bateriové napájení je
jednoduchá:
Napájení 12 V z akumulátoru
se prostě přivede do
bodu výstupu stabilizátoru 7812, jehož
výstup
(pokud používáme oba způsoby
napájení) bude
samozřejmě odpojen. Výstupem jsou jen dva kmitočty, ale
sinusové. Velikost skříně je dána
použitým
displejem. Přístroj je rozdělen na 2 desky, na
dolní je
zdroj a filtry, na horní vše ostatní.
Modul NEO-7
je samostatně připevněn na zadní panel. Sice má
vestavěnou anténu, ale její citlivost
většinou
nevyhoví, proto se připojuje externí
aktivní
anténa.
|
Záměrně jsou
použity konektory
různých velikostí, aby nebyla možná
jejich
záměna. Použitý oscilátor je
10 MHz,
původní
20 MHz nebyl k sehnání. Ale
objímka je
tam
připravena na oba typy. Ve schematu jsou zakresleny oba,
osadíme
samozřejmě jen jeden z nich. Podle použitého
oscilátoru
přepneme jumpery JP1 a JP2: Při 10 MHz je JP1 v poloze 2-3 a
JP2
sepnut,
při 20 MHz je JP1 v poloze 1-2 a JP2 rozepnut. Procesor je
Atmega328 ze
sady Arduino. Tak, jak je na desce zapojen se chová jako
Arduino
Uno. U použité dvoubarevné diody jsou
nastavené
různé proudy, neboť pokud je nastavíme
stejné, tak
zelená část svítí zeleně,
červená
červeně, ale pokud jsou oba stejné, tak
svítí
také téměř červeně, neboť zelený svit
se
v červeném prakticky ztrácí a
výsledek
není žlutý. Alternativou je samozřejmě
použití
dvou samostatných LED-diod.
|
| Horní deska |
Deska zdroje |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Program
Z původního
programu nezbylo
skoro nic. Nejen použití jiného displeje, ale
vynechání
ovládání
výstupního přepínače, které
původně tvořilo
podstatnou část programu a zavedení
ovládání dvoubarevné
LED-diody. A aby byla
plocha tohoto velkého displeje nějak zaplněna,
zobrazují
se další údaje, nepodstatné
pro činnost,
jako je zeměpisná poloha, čas atd. Podle
provedeného
zapojení se program nahrává s
nastavením,
jako by šlo o Arduino Uno. Ovšem je
nutný
převodník USB/serial. Použitý MCU ATMEGA328
má
být údajně náhradní čip do
desky Arduino
Uno, ovšem nešel naprogramovat a
v původní desce
nefungoval. Zakoupený druhý kus (v GM
Hr.Kr) se choval
stejně. Ale šel do nich vypálit nový
zavaděč
(který je součástí
původního IDE) a pak
bylo již vše OK. Takže použít
levnější
provedení bez zavaděče a nahrát si jej (pokud to
umíme).
|
Nastavení Procesor IO2 Atmega328
naprogramujeme
buď zasunutý v kitu Arduino Uno nebo
přímo kabelem přes
konektor K2.
Po zapnutí nastavíme trimr R12 tak, aby displej
byl
čitelný. Pro další
nastavování již
potřebujeme signál z družic. Pokud již
svítí LED
zeleně (zachycené nejméně 3 družice),
spojíme JP3
(tím rozpojíme smyčku PLL) a podle
signálu na
výstupu 6 obvodu IO5 nastavíme trimrem
R9
oscilátor. Potom již zůstane JP3 trvale
rozpojený.
Panel Všechny kabely
vedoucí k panelům jsou připojeny do horní desky
přes konektory.
Nápisy na panelu jsou navrženy na počítači,
vytištěny na barevné
laserové tiskárně a zalaminovány v
copy-centru. Modul NEO-7 je umístěn na
zadním panelu, aby bylo možno k němu připojovat
vnější aktivní antenu.
Bez této vnější antény
celý přístroj i s modulem NEO-7 vyžaduje
volný výhled
přímo na velkou
část oblohy, aktivní anténa pracuje i
se signálem na vnitřní straně okna.
|
|
Závěr
Z provozu byly
získány další poznatky.
Naprogramované pulzy z modulu NEO-7 jdou dost nepravidelně, výsledkem je kolísání výstupního kmitočtu kolem normálové frekvence. Občas dochází k výpadkům signálu GPS, kdy se přístroj přepne do autonomního režimu daného místním oscilátorem. Obnovení signálu způsobí skok ve fázi signálu, což je velmi nepříjemné, pokud chceme využívat přesnosti signálu. Uváděnou přesnost 10-10 tímto přístrojem proto nelze dosáhnout ani teoreticky. Proto stačí použití hradla XOR i s jeho nedostatky jako fázový detektor místo náročného diodového kruhového detektoru. Vliv rozptylu šíření vln z družic k přístroji lze v tomto případě zanedbat v porovnání s vlastními odchylkami přístroje. |
Horší je, že z modulu NEO-7, naprogramovaném na výstup 106 pulzů/sec tyto pulzy sice dá, ale tak nerovnoměrně, že je uvedený fázový detektor někdy zpracuje jinak, než je žádoucí a frekvence se občas "protočí". Kvalitní oscilátory nabízené na internetu v porovnání s tímto zařízením poskytují vyšší přesnost i bez navazování na družice GPS. Pro radioamatérské použití - pro slaďování oscilátorů pro provoz SSB, FM, CW na KV to lze použít, pro digitální provozy či kalibraci oscilátorů v zařízeních na mikrovlny těžko. Zařízení vyžaduje dobrý výhled na oblohu (minimálně 3 letící družice GPS), což použití tohoto přístroje výrazně omezuje a pokud na velkou část oblohy vidět není, nepomůže k funci ani zázrak. U mne je budoucnost toto zařízení nejistá vzhledem k tomu, že mám o několik řádů přesnější etalon řízený DCF a pro několik zde použitých drahých součástek se najde lepší použití. |
Schema
Rozpisky
Plošné spoje a rozložení součástek
Výrobní podklady
Program
Odkazy
| [1] původní článek Praktická elektronika č.2/2021 |
| [2] http://www.ok2imh.com/view.php?nazevclanku=referencni-oscilator-10mhz-za-par-korun&cisloclanku=2019070003 |
| [3] http://radio.ok1cjb.cz/08_mereni/12_GPS-1.html |
| [4] Brennan, P. V. (1996). Phase-Locked Loops Principles and Practice. Houndmills, Basingstoke: MACMILLAN PRESS LTD. |
| [5] https://www.mongi.cz/index.php/konstrukce/mereni/34-gps-kmitoctovy-mini-normal |
| [6] http://sroll.net/ok1srd/technika/buttheworddolni/index.html |
Home